Understanding the Types of Processes That Can Be Performed on a Point Cloud
Point clouds are becoming increasingly popular for use in a variety of industries, including construction, surveying, and engineering. A point cloud is a 3D representation of an environment created by capturing and processing laser or photogrammetric data. Once a point cloud is created, there are a variety of processes that can be performed on the data to extract meaningful insights and produce valuable results. In this blog post, we’ll explore the different types of processes that can be applied to a point cloud.
Filtering and Cleaning
Before any other processing can take place, the point cloud data must be cleaned and filtered to remove noise, errors, and other unwanted data. This is important to ensure that subsequent processing is accurate and reliable. Filters can be used to remove outliers, smooth surfaces, and remove noise.
Registration and Alignment
Point clouds can be generated from a variety of sources, and the data can be captured at different times and from different positions. To create a unified point cloud of the entire environment, multiple point clouds must be aligned and registered together. This process involves identifying common points between the different point clouds and aligning them to a common coordinate system.
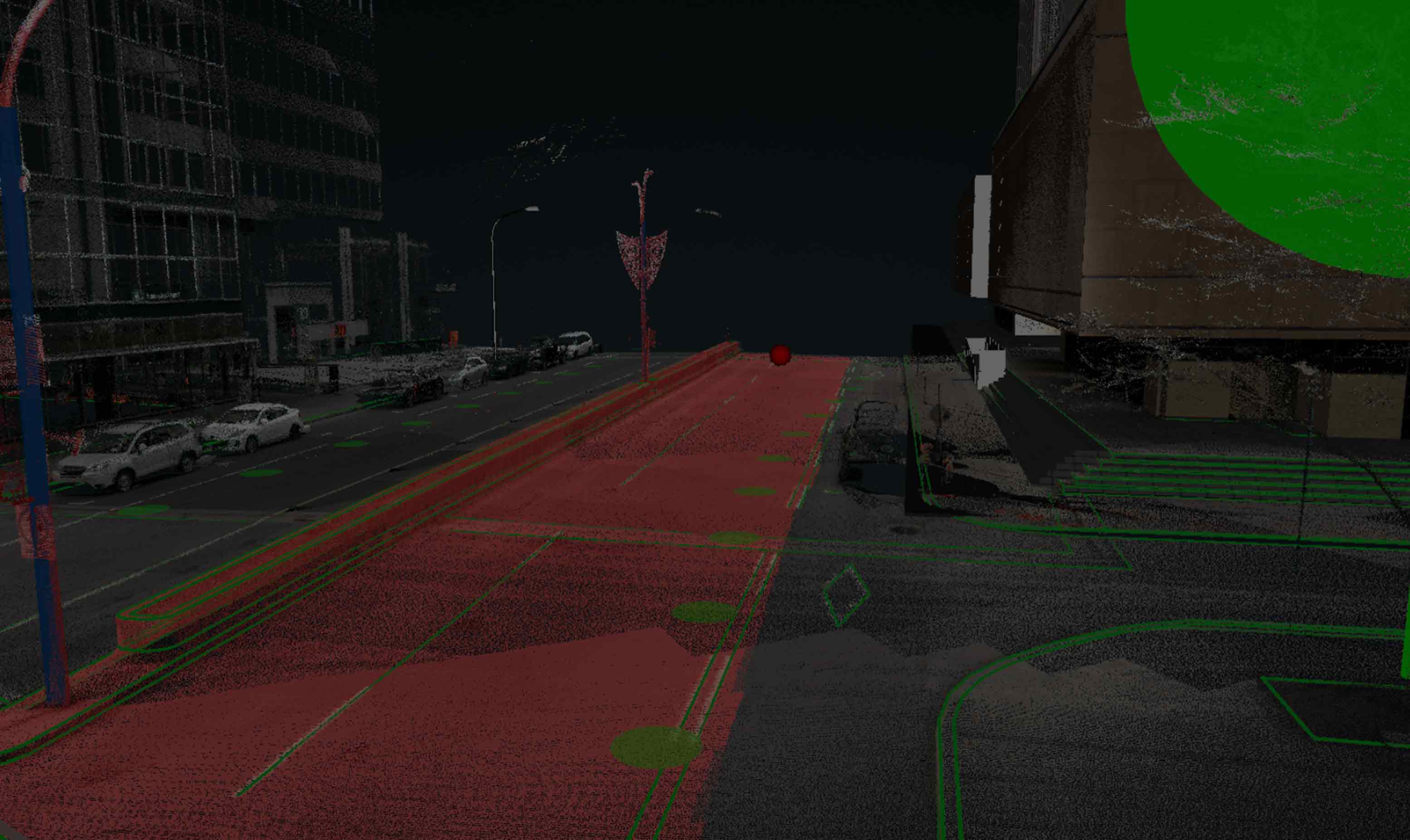
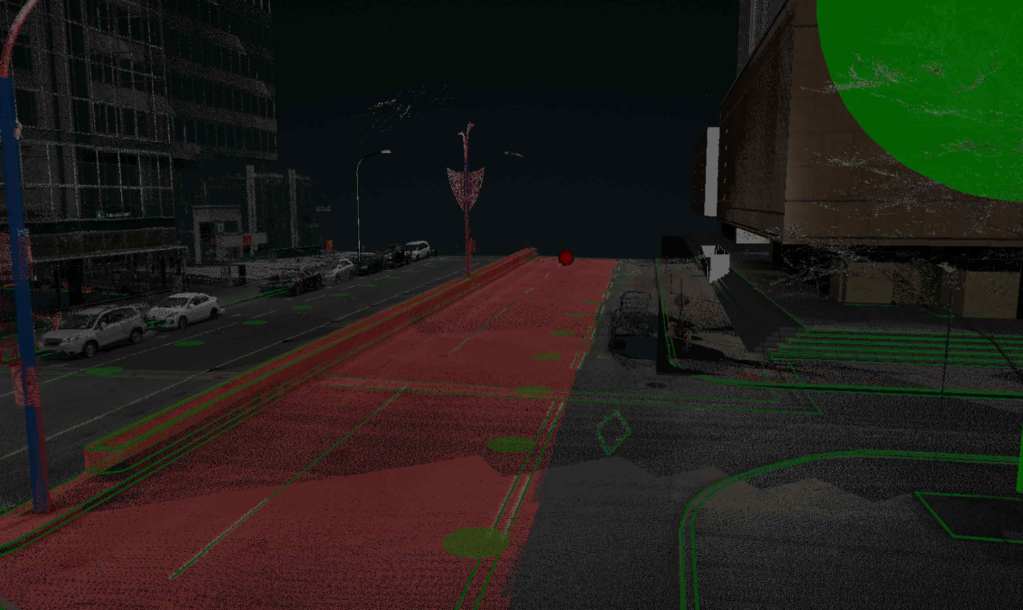
Segmentation
Segmentation is the process of dividing a point cloud into meaningful components or objects. This can be done using a variety of techniques, including geometric feature extraction, color-based segmentation, and clustering algorithms. The goal of segmentation is to identify individual objects or regions of the environment that can be further analyzed.
Feature Extraction
Feature extraction involves identifying and extracting meaningful features from the point cloud data. This can include identifying edges, corners, and other features that are important for subsequent analysis. Feature extraction is often used in object recognition, where specific objects of interest need to be identified and located in the environment.
3D Modeling
Once the point cloud has been filtered, aligned, segmented, and features extracted, it can be used to create 3D models of the environment. These models can be used for a variety of applications, including virtual reality simulations, building information modeling, and augmented reality experiences.
Analysis and Measurement
Finally, the processed point cloud can be used to perform a variety of analyses and measurements. These include measuring distances, areas, and volumes, as well as analyzing surface curvature and identifying defects or irregularities. These analyses can be used for a variety of applications, including quality control, structural analysis, and environmental monitoring.
In summary, point clouds are a rich source of data that can be used for a variety of applications. From filtering and cleaning to 3D modeling and analysis, there are a number of processes that can be performed on point cloud data to extract valuable insights and produce valuable results. By understanding the types of processes that can be performed, you can unlock the full potential of point cloud data in your work.
VisionLidar provides a comprehensive suite of tools for pre-processing, classifying, visualizing, and analyzing point cloud data, including advanced features such as AI-driven deep learning classification and object detection. These capabilities enable efficient data integration, measurement, and custom analysis, making it an invaluable resource for applications in urban planning, construction, and environmental monitoring.
We’d love to hear about your project! Just get in touch.